My research interests span broad areas of control theory and dynamic systems. I am an
interdisciplinary system researcher with academic and industrial training in both
electrical and mechanical engineering disciplines. My research includes
mathematical analysis as well as experimental methods. I am primarily
interested in working on existing and emerging problems related to sustainable energy
systems [5-9]. Also, I am enthusiastic about electric machine theory and servo-system
design and improvement [2, 4, 8, 12]. My recent work includes design and implementation of
high-precision contouring of servo-systems [4], and theoretical development of modular
control design over networks [2, 3]. Currently, I work on developing safety verification
algorithms for geofence avoidance of unmanned aerial vehicles [1].
Controls
Safety verification of cyber-physical systems
is imperative because of the ever-increasing proliferation of smart networks. Deductive
safety verification techniques typically involve some continuous analog of induction,
for example, differential induction or barrier certificates. Moreover, control systems
are often designed under the assumption that controllers run continuously, while the
actual implementation involves a digital controller that operates at a given sample
rate. Our current efforts focus on developing numerically viable safety verification
techniques for geofence avoidance of unmanned aerial vehicles. Our proposed safety
verification technique allows a trade-off between the size of the sample period and
the convergence rate. An expression for the control law and an explicit relationship
between sample period and control parameters are presented. It is shown that the
proposed control law drives all state trajectories initiated in the safe set to the
origin without violating safety criteria as long as the sample period remains
sufficiently small. Moreover, if the control signal is bounded between the proposed
limits, it is shown analytically that a pilot-based configuration also remains in
the safe set [1].
Component swapping modularity is a recently
proposed concept in control networks
to guarantee desired closed-loop performance using low-order modular controllers for smart
components. Conventionally, complete control redesign is inevitable when swapping a
system's component with a dynamically different counterpart. However, our proposed
algorithm achieves desired closed-loop performance only by tuning the low-order controller
of the swapped component. The major part of the control remains unchanged for all the
variants of the swappable component. The proposed algorithm dramatically simplifies
control design and reduces calibration time and effort, particularly, in applications
from automotive industry and power networks [2,
3].
Multivariable Newton-based extremum seeking (ES)
extends the conventional
gradient-based ES designs, so uniform transients are achieved for all channels of a
multivariable optimization problem. The proposed design governs the system to its optimal
point on a straight path, so control effort is also minimized. The Newton-based ES is
robust under external disturbances or model uncertainties. Moreover, ES algorithms in
general, and specifically the Newton-based design, are real-time continuous and do not
require processing units which further simplifies algorithm implementation and reduces
manufacturing and maintenance cost [10].
Energy Systems
Aggregate modeling and control of thermostatically
controlled loads (TCLs) provide a
promising avenue to improve energy efficiency and the stability margin of power networks.
We proposed a novel analytical model for a large population of heterogeneous heating/cooling
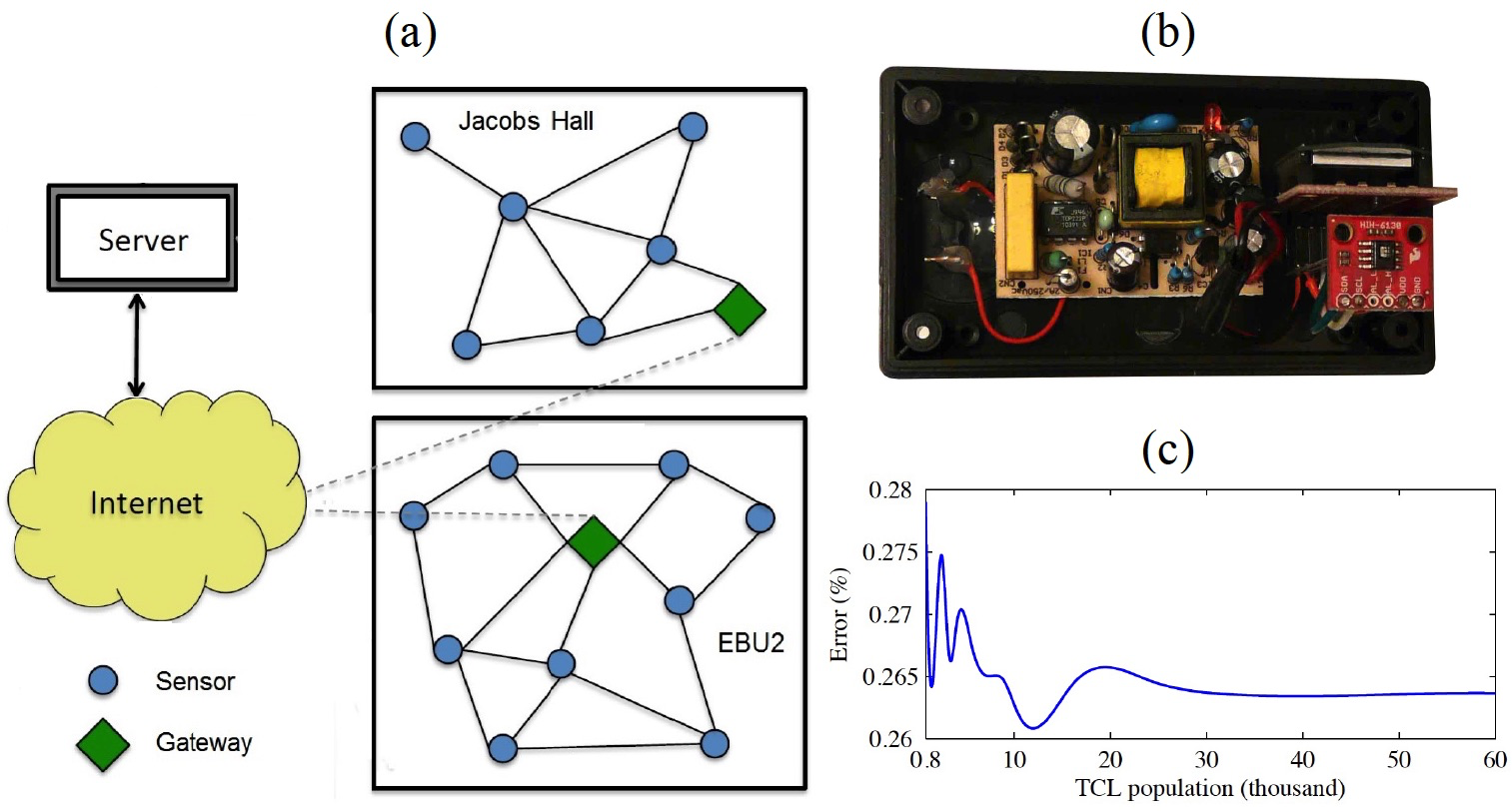
units. As shown in Fig. 1(c), averaged accumulated error of the model is less than 0.3%.
Simple and yet effective power control algorithms were designed using the proposed model.
Our model is beneficial to utility managers as well as the end-user to increase power
efficiency and reduce energy cost [5]. We designed and
installed a wireless sensor network, illustrated in Fig. 1(a), to verify the effectiveness
of our proposed model, experimentally.
Fig. 1. (a) Wireless sensor network to collect field data, (b) inside view
of a sensor node, and (c) variation of the proposed model from Monte Carlo
model versus TCL population
Power optimization of photovoltaic (PV) energy
generators is essential to exploit PV power resources fully. The proposed
algorithm is non-model-based, and hence can be applied to different PV systems with minimal
redesign. It offers the advantages of fast convergence and guaranteed stability over a wide
range of environmental conditions, and yet is simple and cost-effective to implement. Thus,
power efficiency is increased, and energy cost is reduced [6,
7, 9].
Fig. 2. (a) Maximum power point tracking of a PV system using multivariable
Newton-based ES, (b) block diagram of the experiment, and
(c) experimental setup, including: (1) DC bus, (2 and 3) DC-DC converters, (4 and 5) PV panels,
(6) CP 1104, (7) oscilloscope, (8) Simulink and ControlDesck, and (9) DS 1104
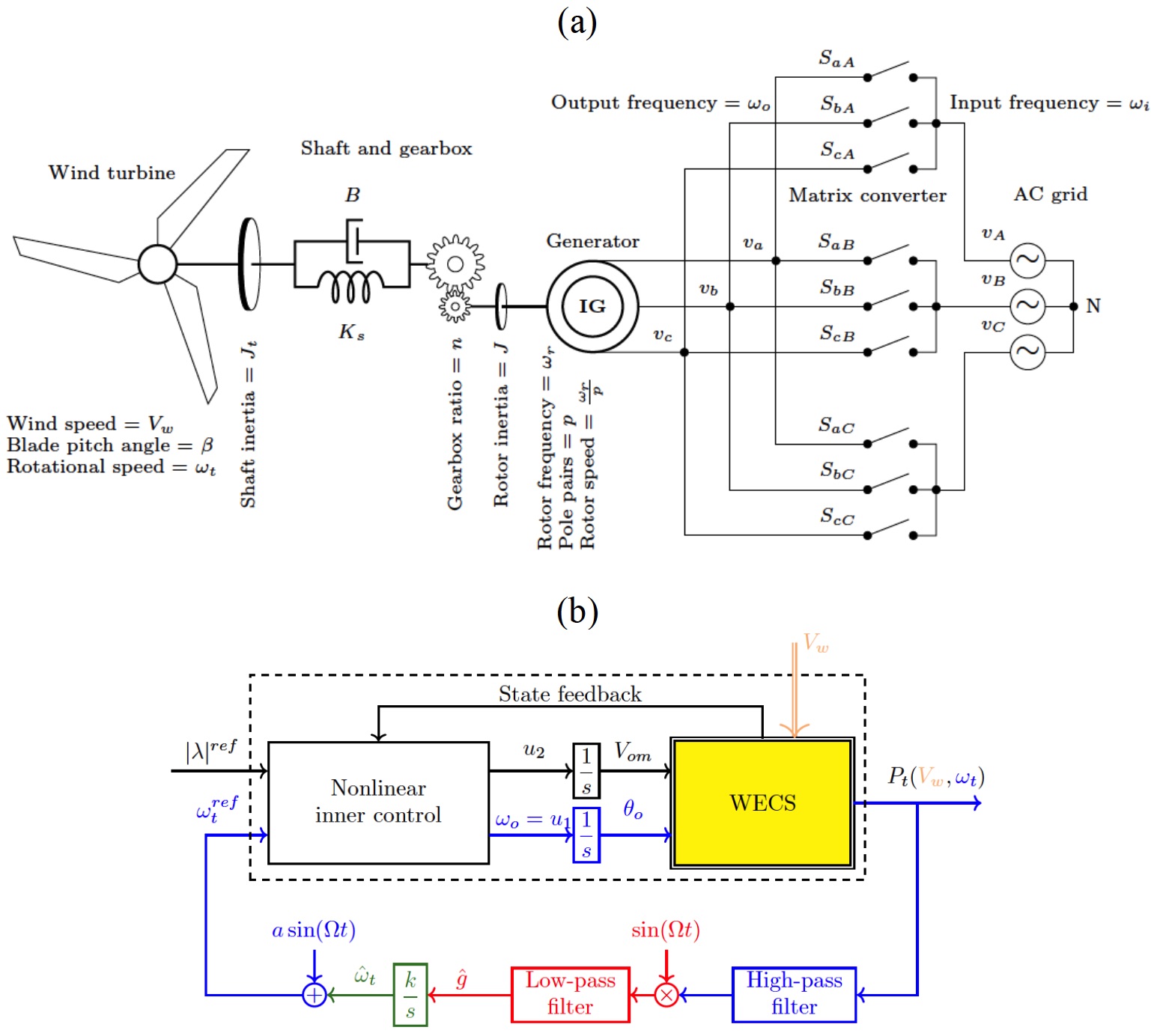
Nonlinear control and power optimization of wind energy
conversion systems (WECS) guarantee maximum
feasible wind power extraction under fast changing wind speeds. We use a nonlinear
controller, based on the field-oriented control concept and feedback linearization, to
achieve instantaneous wind power tracking. Extremum seeking maintains wind turbine energy
yield at its feasible peak and also improves system robustness versus unknown disturbances.
Thus, higher power efficiency is achieved, and ultimately energy cost is reduced
[8, 9].
Fig. 3. (a) Block diagram of a WECS and (b) maximum
power point tracking of the WECS using gradient-based ES and
nonlinear inner control
Precision Mechatronics
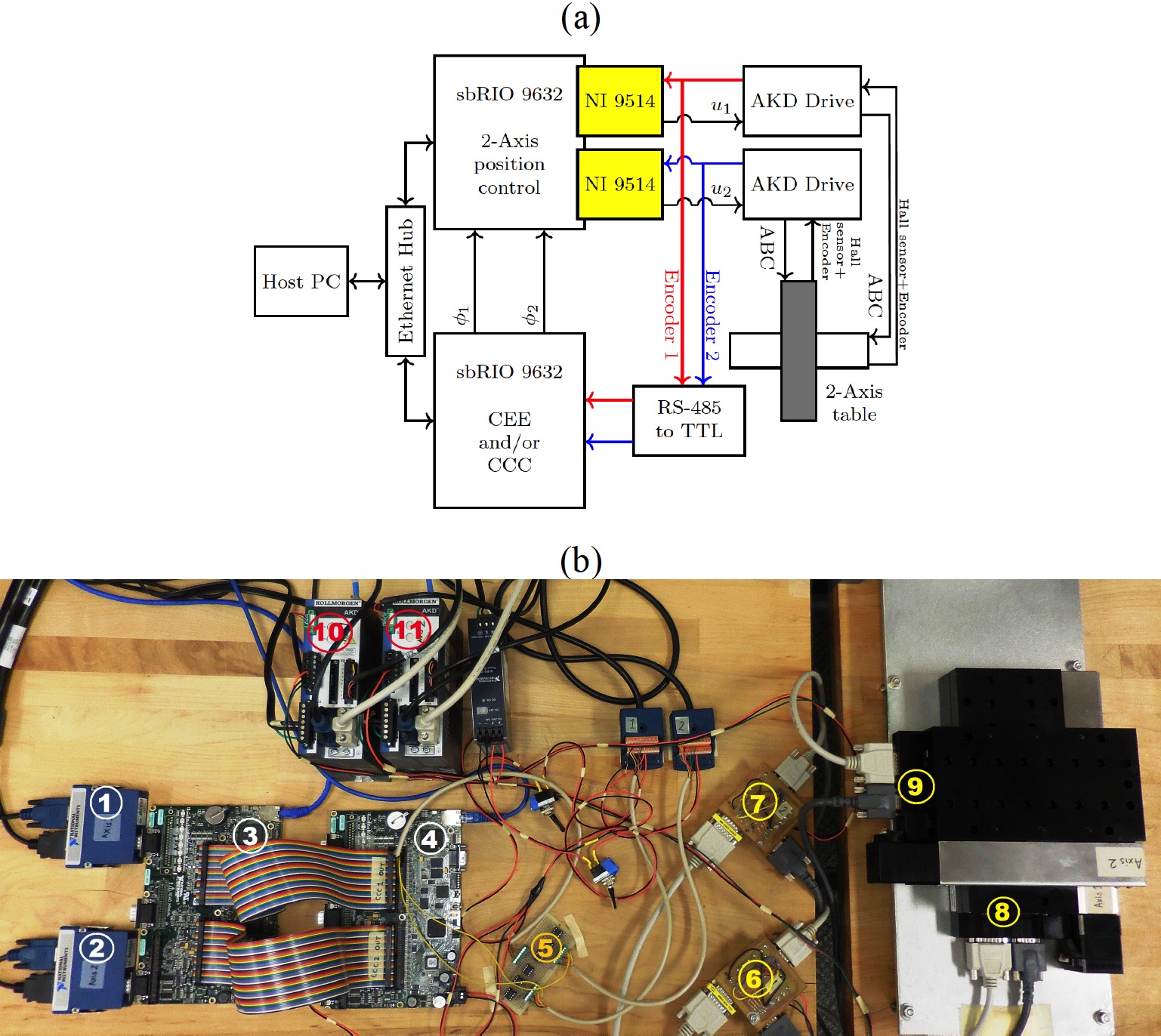
High-precision contour error estimation and contouring
algorithms improve the
accuracy of machine tools, defined using unmeasurable contour error which equals the
shortest distance from the actual position to the reference contour. Hence, we proposed a
precise dynamic contour error estimate (CEE) and a novel integrated contouring algorithm to
govern the contour error of a wide range of reference feedrates to zero. Our experiments
showed as much as 50% reduction in contour error for highly curved fast references
[4].
Fig. 4. (a) Block diagram of the experiment and (b) experimental setup,
including: (1 and 2) NI 9514, (3) sbRIO for position control, (4) sbRIO for CEE and/or
cross-coupling control, (5) RS-485 to TTL adapter, (6 and 7) Hall sensors and incremental encoder adapter,
(8) Axis-1, (9) Axis-2, and (10 and 11) AKD servo-drives
Robust nonlinear control of flexible-link
robots comprises a modified sliding mode
control using global stabilization and nonlinear optimization. The proposed algorithm
constructed based on the sliding mode control because the flexible-link nominal model has
order uncertainty and is sensitive to external load disturbances. The research was
conducted to exploit benefits of high-order switching surfaces to improve closed-loop
system performance of a sliding mode control designed based on a low order nominal model
of the flexible-link [11, 12].
References
A. Ghaffari, I. Abel, D. Ricketts, S. Lerner, and M. Krstić, “Safety verification using barrier
certificates with application to second order systems with constrained discrete inputs,”
American Control Conference, submitted.
A. Ghaffari and A. G. Ulsoy, “LMI-based design of distributed controllers to achieve component
swapping modularity,” IEEE Transactions on Control Systems Technology, to appear.